Sonic Avionics
I founded Sonic Avionics, a research organization at TMU focused on building advanced, open-source avionics systems for high-powered rocketry. Our goal is to compete nationwide with other universities while creating educational resources to help students get involved. I later won the 2025 Stage 1 Esch Awards!

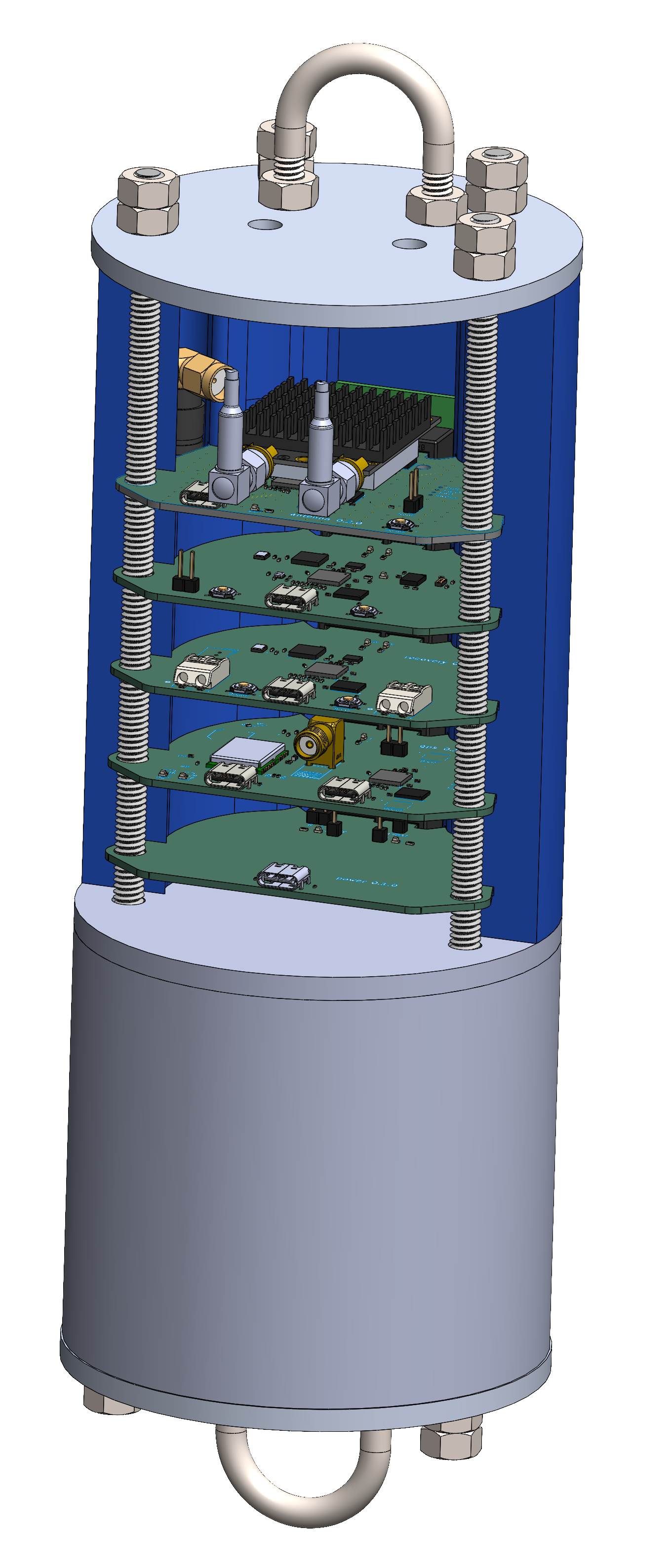
In May 2025, I designed a five-board avionics stack for our rocket that communicates over a CAN bus and consolidates power management, GPS, sensor acquisition, recovery, and data logging/communications into a compact, serviceable package. I did the PCB design in KiCad and modeled the enclosure in SOLIDWORKS, overlaying the enclosure outline in the PCB layout to ensure mechanical clearance and connector access. I manage the designs in GitHub with a workflow that automatically generates PCB renders for our documentation site on each commit, keeping hardware and documentation tightly linked.
The boards were manufactured and assembled by JLCPCB but laid out with generous test points and spacing so they can be probed and reworked by hand. The enclosure includes provisions for embedding antennas in the walls to protect them while maintaining signal quality. Throughout the project I focused on testability, rework, and documentation so that production, bring-up, and debug of this complex electromechanical system would be fast and reliable.

CAD


Overview of System
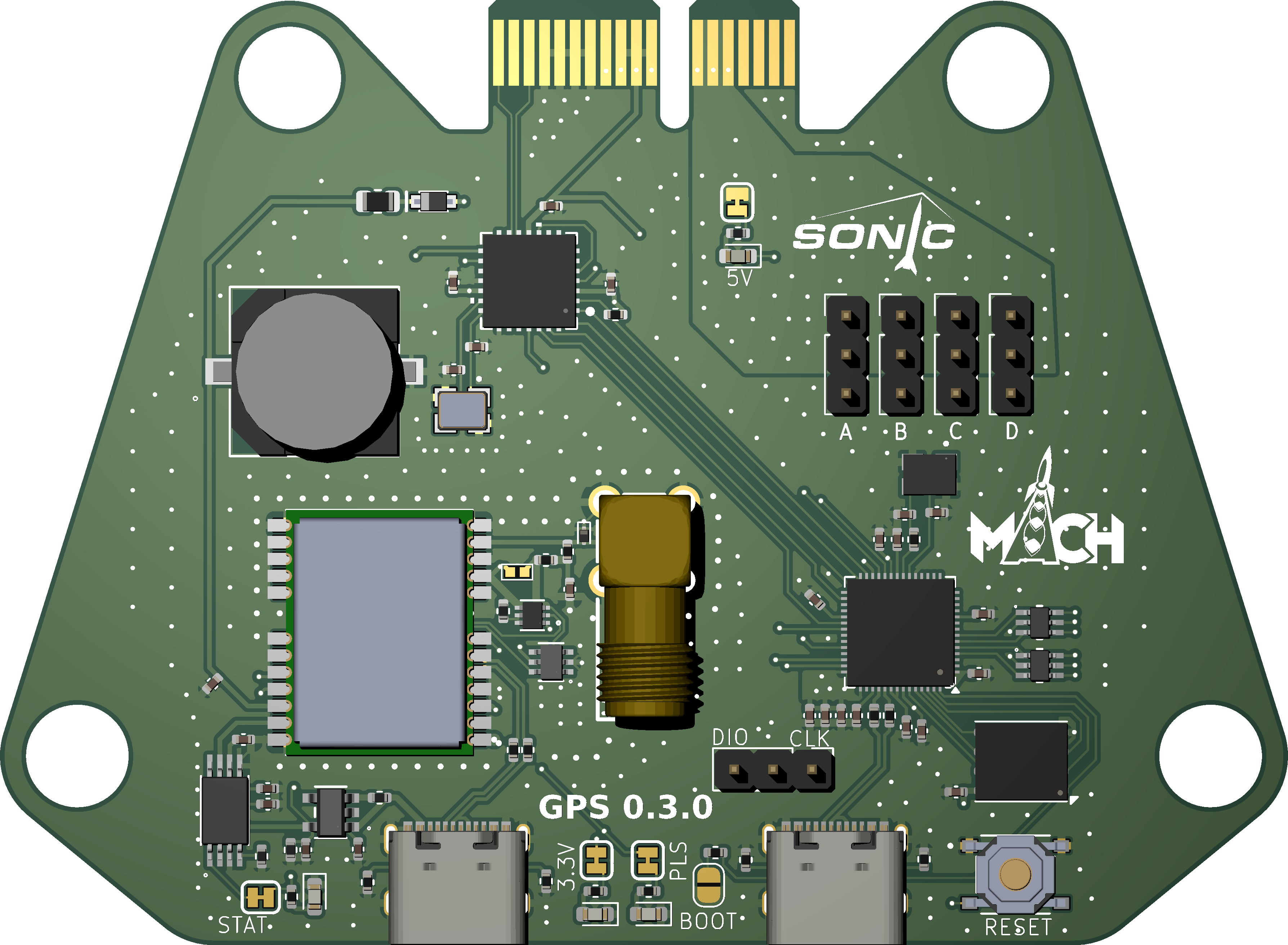
The avionics system is composed of five modules interconnected through CAN bus. These modules are: Power, Sensors, GPS, Antenna, and Recovery. The backplate features PCIe slots and connects all the modules.
Requirements and Design Goals
The primary goal of the 4-inch avionics system is to enable learning. This is the first system of many.
Primary Functional Requirements
- Don't be janky.
- Fully open-source.
- Assemblable by JLCPCB.
- Incorporate all known best practices to enable scalability.
- CAN-enabled system in a 4-inch diameter form factor.
Battery
The system uses a SRAD battery pack for custom-built boards, and COTS components use a commercial battery pack. For the first launch, a 2s 2p pack inspired by this video is used.
Improvements for the Next Version
- USB Multiplexer: Controlled by a Raspberry Pi Zero. The backplate will host the MUX, enabling digital reboots and removal of USB ports except on the Pi Zero.
- Programmable Power MUX: Allows remote rebooting of components.
- Ethernet: Inclusion for data transmission.
- Camera Transmission
- USB Protection IC
- Auto fuel fill
Prototype Development
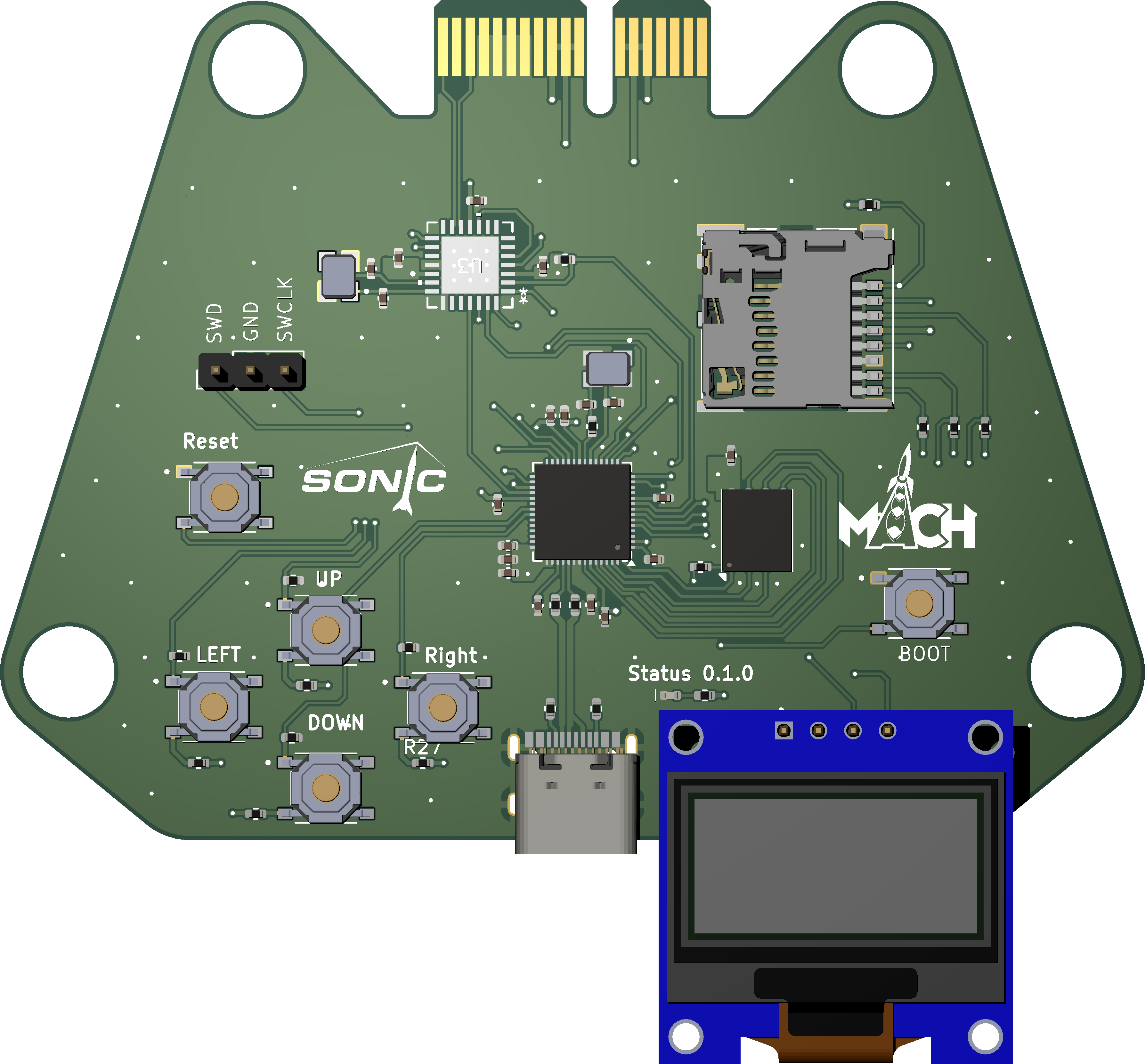
v0.1.0 - First Integrated Stack (January 2025)
The first avionics stack included five modules: four sensor modules capable of intercommunication, and one dedicated to powering the system. The 4-inch diameter form factor ensures compatibility with the Mojave Sphinx, an open-source rocket with freely available build instructions.
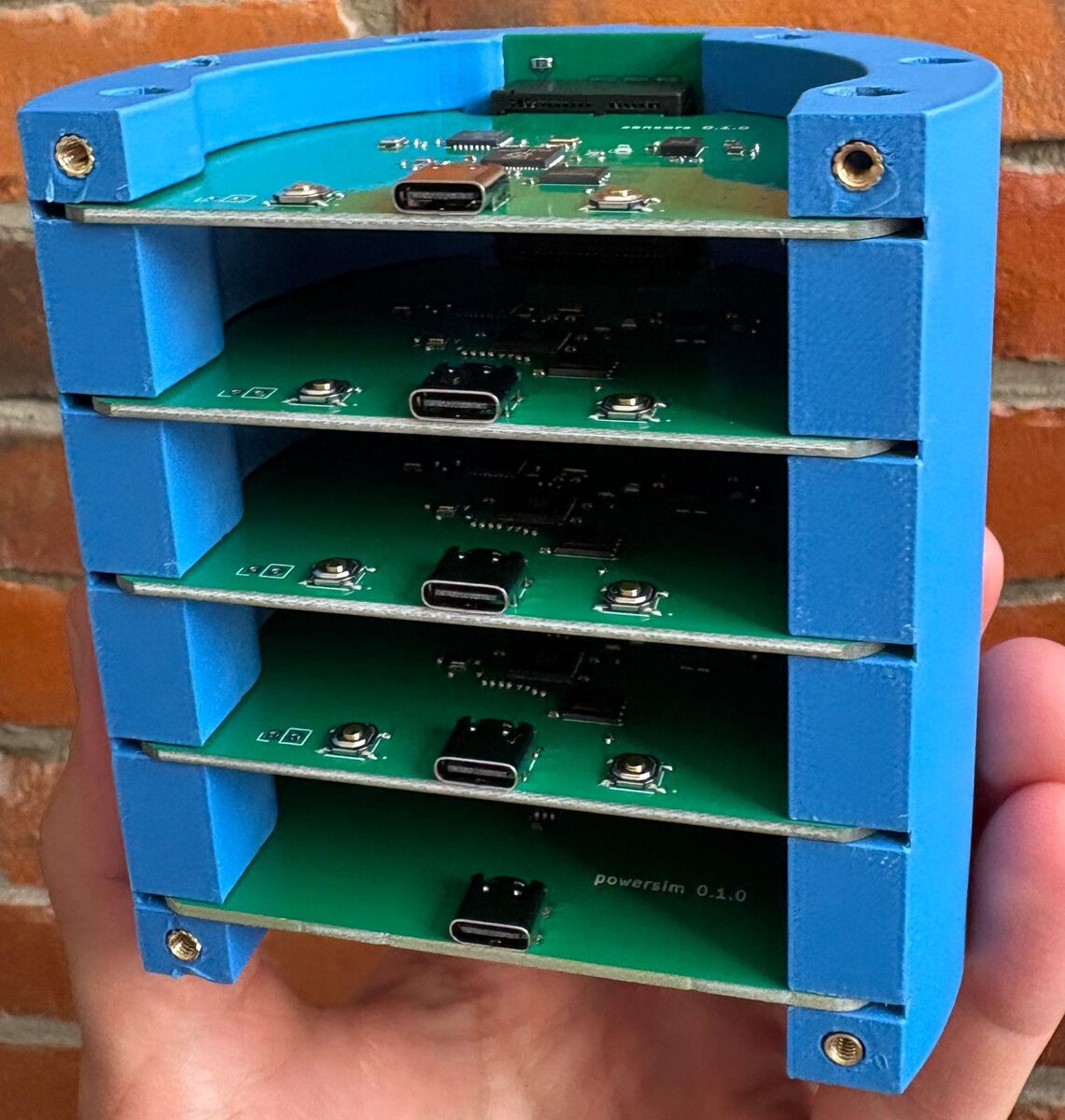
v0.1.0 Integrated Avionics Stack
Power Module Prototype
I developed a prototype power module that can switch between battery and USB output. It also charges the battery and monitors its level, providing critical power management for the entire system.
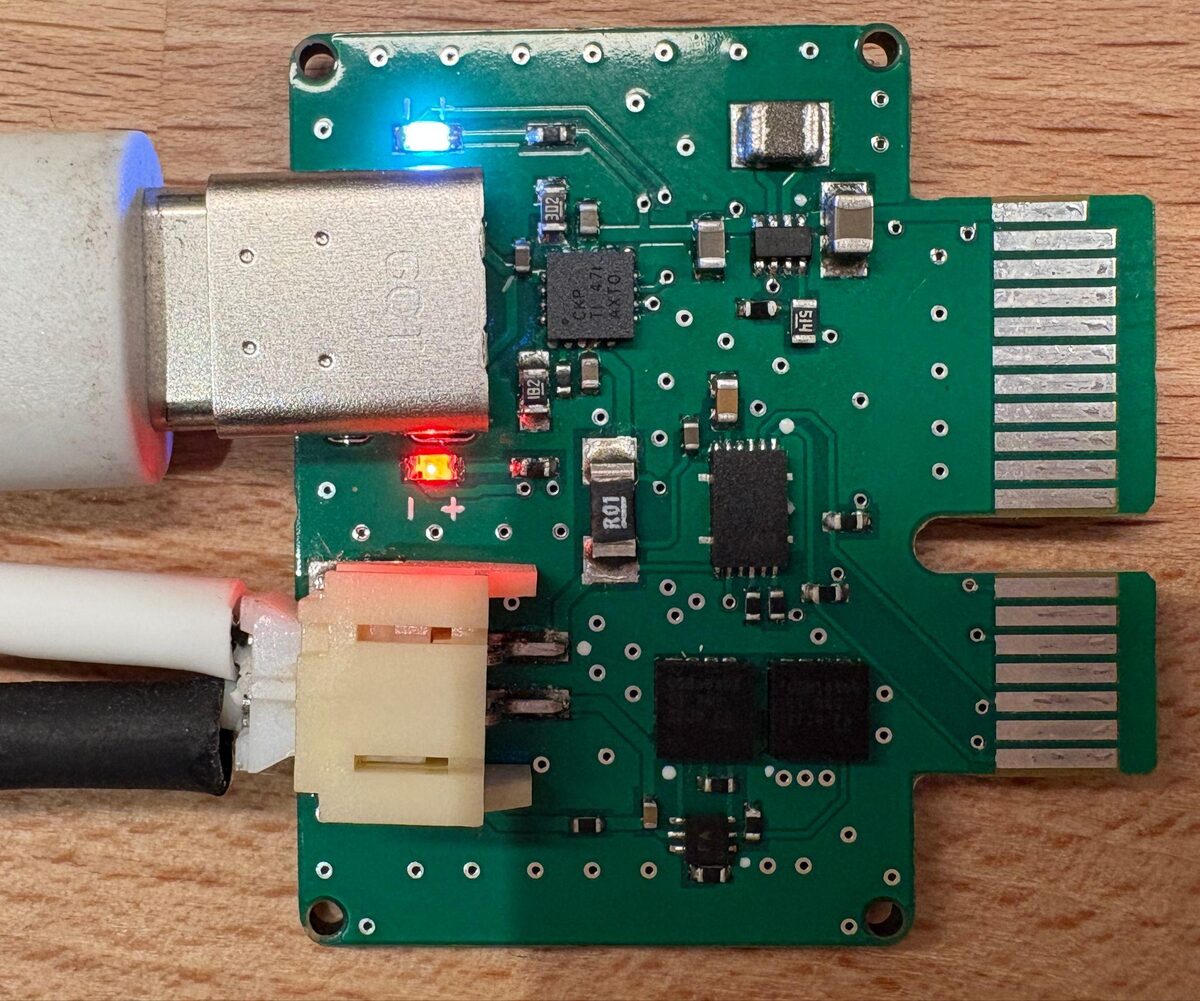
Prototype Power Module with battery charging and level monitoring
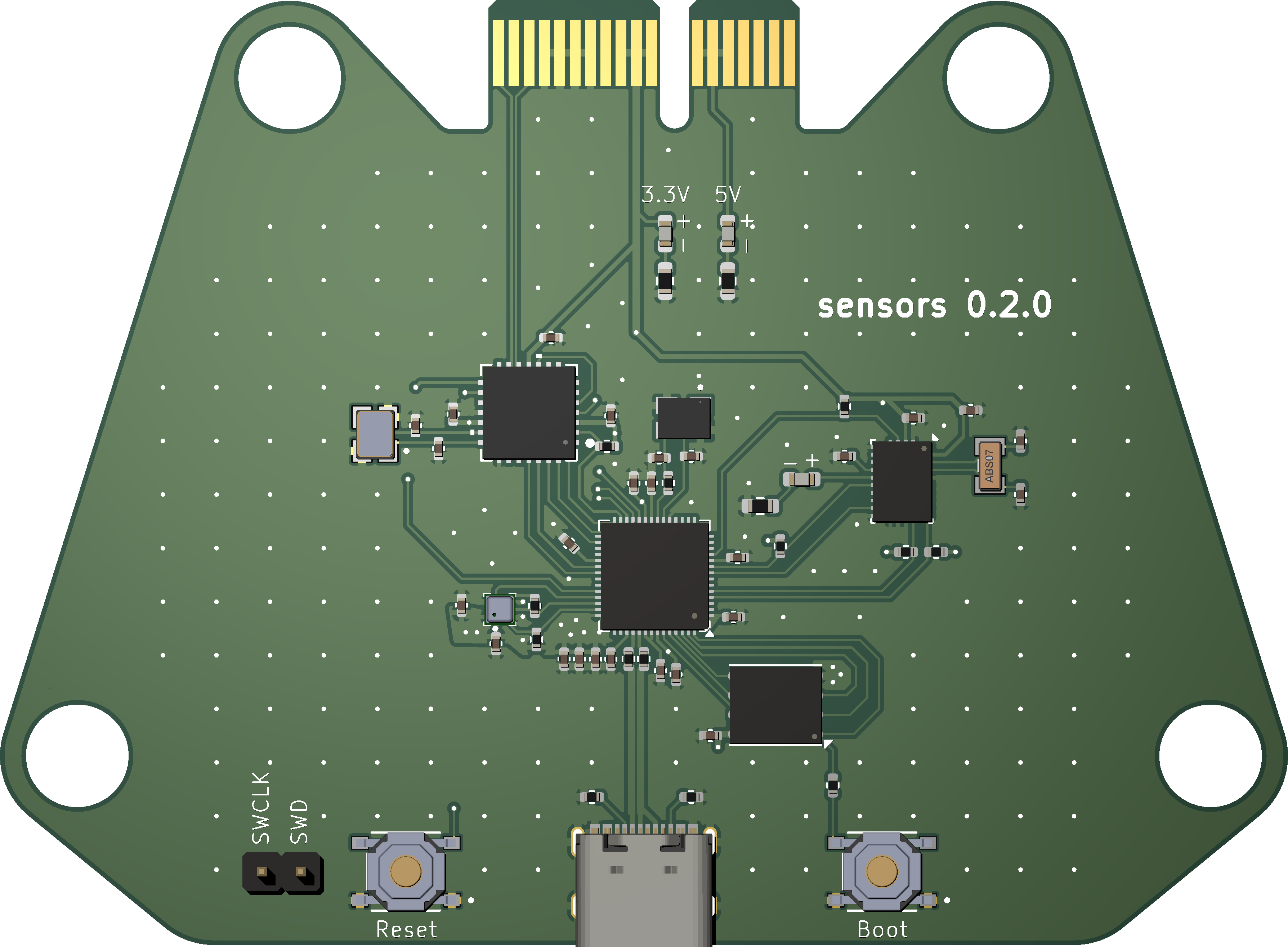
v0.2.0 - High-Altitude System
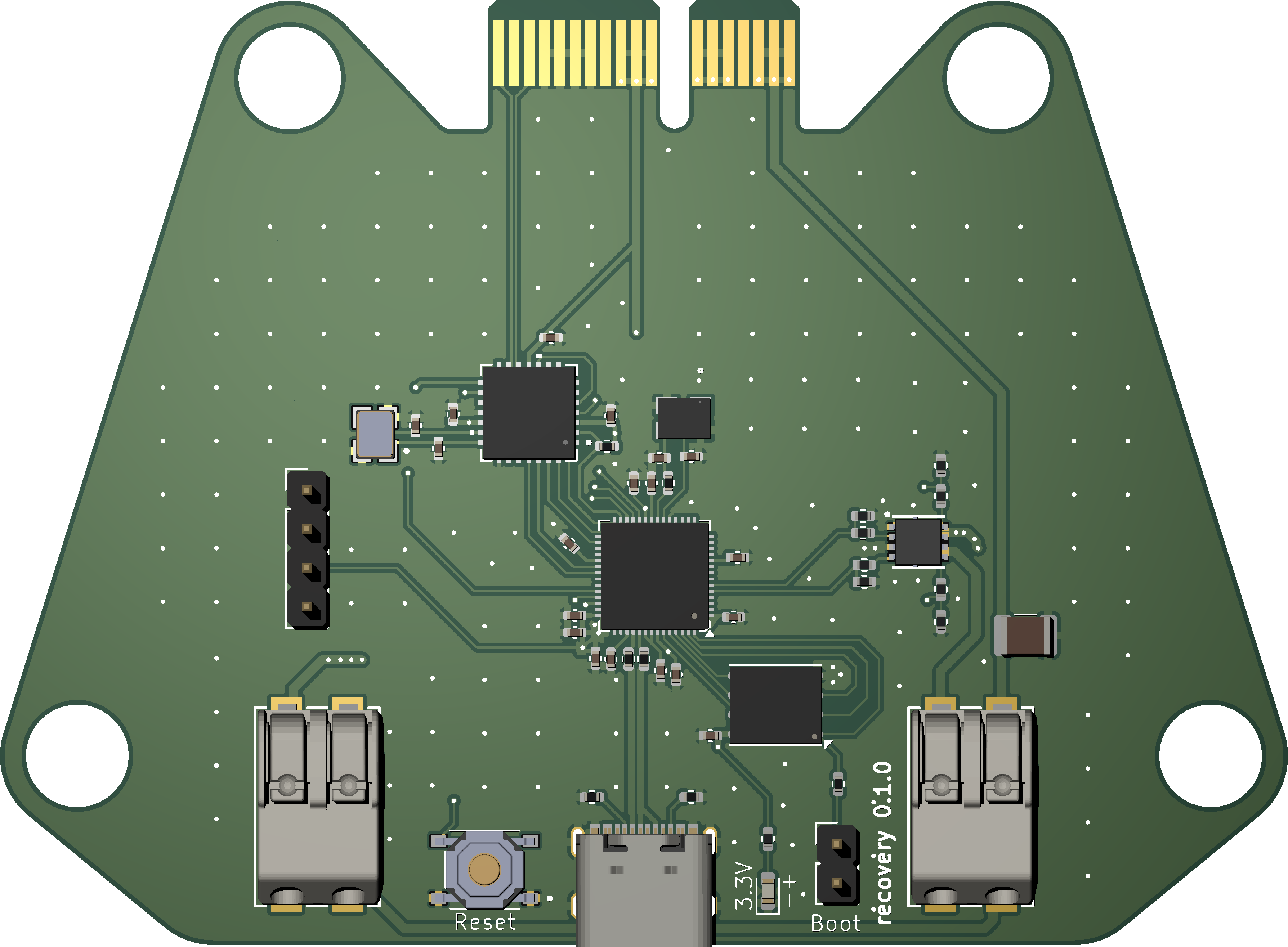
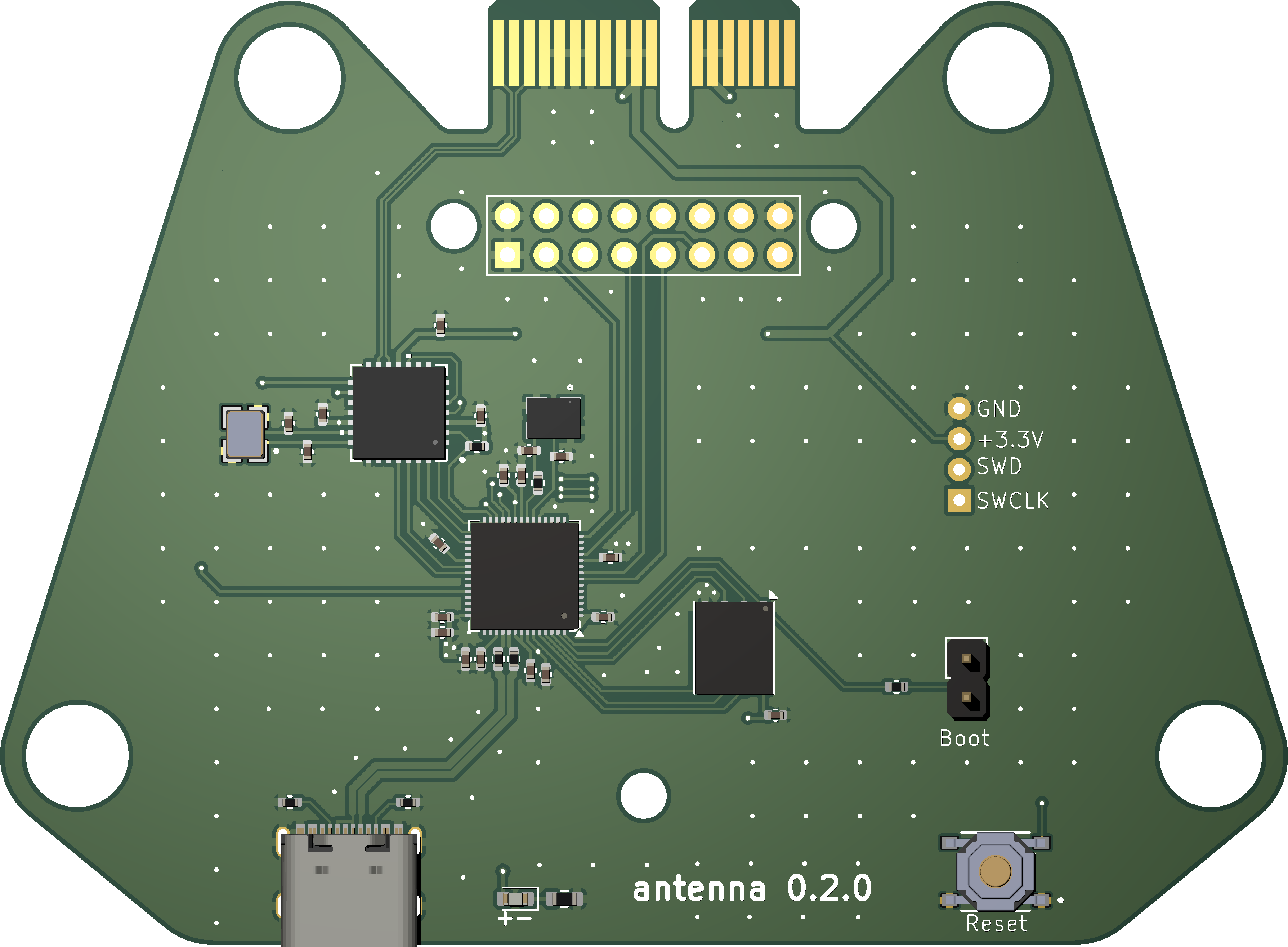
The v0.2.0 system features a high-powered antenna capable of transmitting data at altitudes above 30,000 feet. The sensor module was designed in KiCad, an open-source PCB design tool.
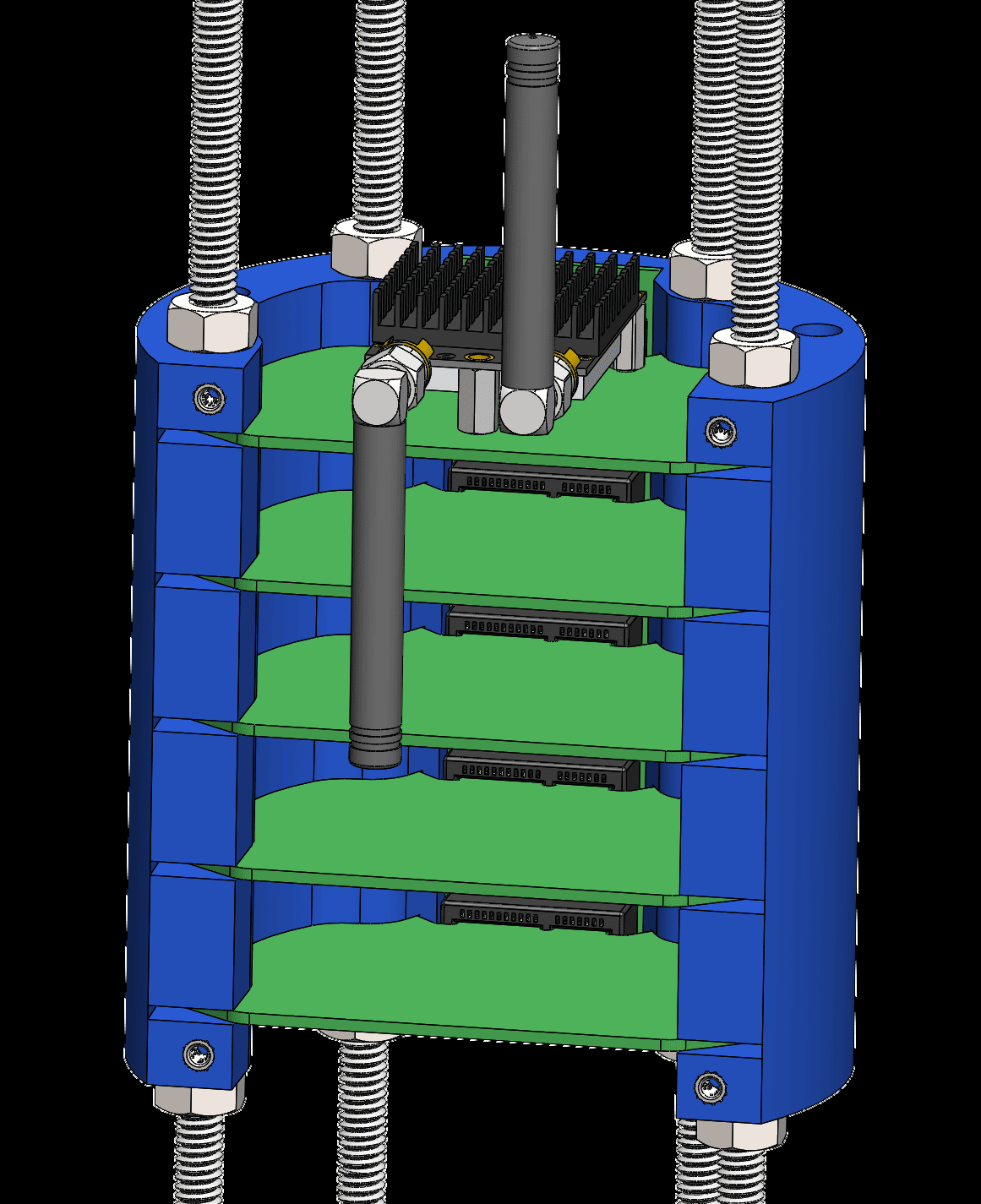
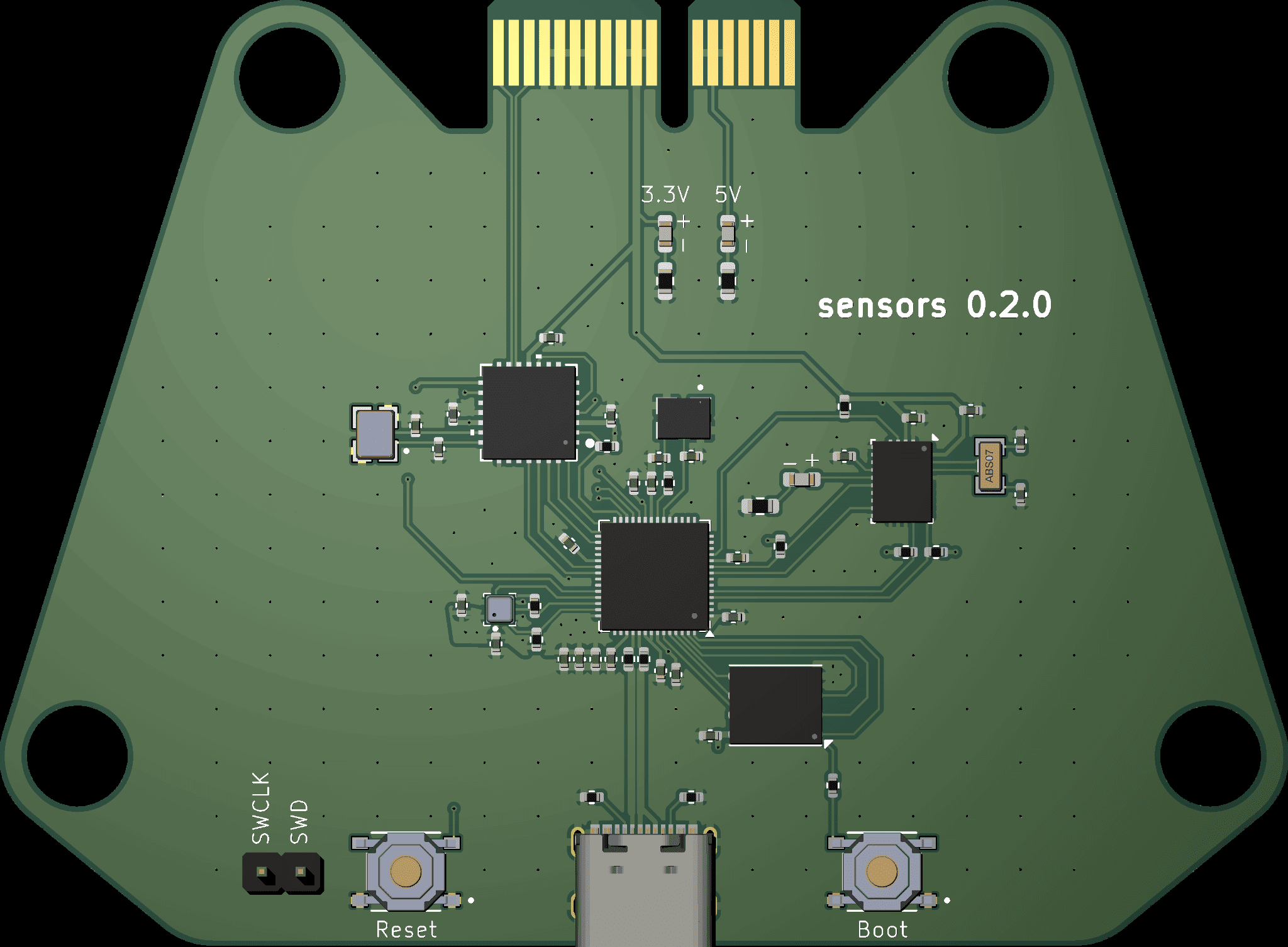
v0.2.0 CAD rendering and sensor module design
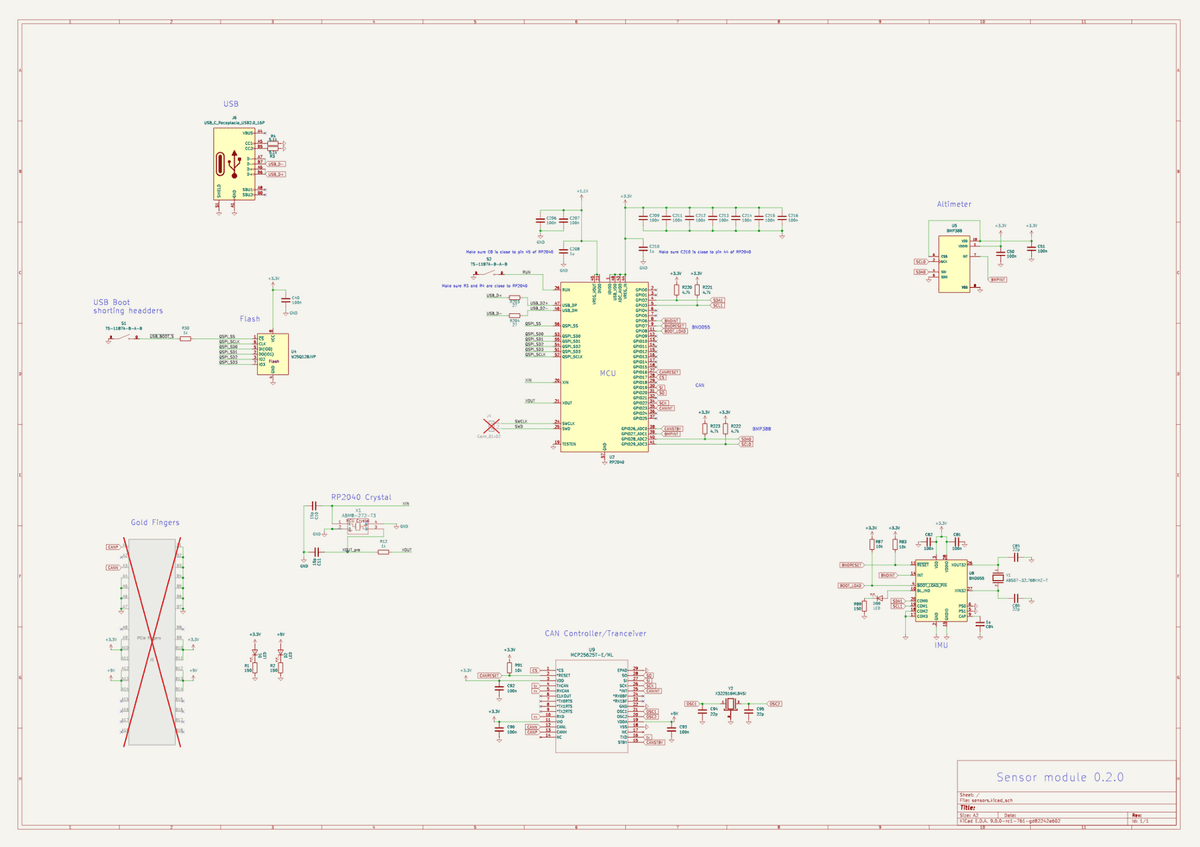
v0.2.0 Sensors Module Schematic - all designs available on GitHub
2025 Stage 1 Esch Awards
